

 QQ
QQ
首先在食品加工领域,机器人对食品的抓取、拣选是实现自动化中的一个常见问题,需要实时、**的图像识别技术,但食品通常形状不规则、特征多变,导致快速、稳定的视觉分析与定位较为困难。
以食物中常见的虾为例——目前在工厂的自动剥虾生产线上,有一个关键环节未能实现自动化——对于虾身的抓取与**放置,目前仍然完全由人工操作,极大地限制了生产线的速度、精度、稳定性与生产效率,而且工作本身枯燥无味,浪费人力与时间。
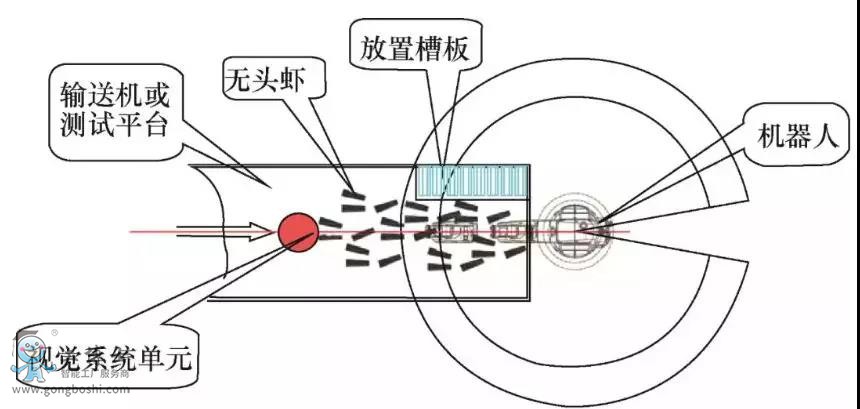
在自动化方案中,核心是视觉系统与机器人的配合动作。视觉系统单元对流水线上移动的虾身进行实时拍摄,同时内置算法识别出目标点位置,并引导机器人进行抓取与放置,从而替代人工操作,实现整条生产线的全自动化。
ABB机器人的研究人员提出结合深度学习与生物特征识别的目标点定位方法,并在实际数据上进行了模型训练与性能验证。首先将虾的图像进行预处理后输入深度学习模型得到粗定位点,之后对虾的位姿进行归一化并提取轮廓线,基于对搜索域内的轮廓拟合与特征点检测以准确定位目标点。
实验结果证明了该方法的有效性:在包含1000张实测样本的测试集上,ABB机器人整体方案的识别率达到了惊人的97.2%,可初步满足实际工业应用的要求。
