

 QQ
QQ
-
DeviceNet通信协议是由美国的Allen-Bradley公司(后被洛克威尔自动化公司合并)发的,以Bosch公司开发的控制器局域网络(CAN)为其通信协议的基础。DeviceNet移植了来自ControlNet (另一个由Allen-Bradley公司开发的通信协议)的技术,再配合控制器局城网络的使用,因此其成本较传统以RS-485为基础的通信协议要低,但又可以有较好的强健性。
-
为了推广DeviceNet在世界各地的使用,洛克威尔自动化公司决定将此技术分享给其他厂商,后来DeviceNet通信协议由位于美国的独立组织ODVA管理, ODVA维护DeviceNe的规格,也提供一致化测试,确保厂商的产品符合DeviceNet通信协议的规格。
-
DeviceNet也是一种串行通信链接,可以减少昂贵的硬接线,DeviceNet所提供的直接互连性不仅改善了设备间的通信,同时也提供了相当重要的设备级诊断功能,这是通过硬接线I/O接口很难实现的。
-
除了提供ISO模型的第7层(应用层)定义外, DeviceNet规范还定义了部分第1层(物理收发器)和第0层(传输介质).
-
DeviceNet网络*大可以操作64个节点,可用的通信波特率分别为125kbps, 250kbps.和500kbps三种。
-
设备可由DeviceNet总线供电(*大总电流为8A)或使用独立电源供电。
1.2 DeviceNet选项
709-1 DeviceNet Master/Slave选项对应的硬件位置如下图A处。



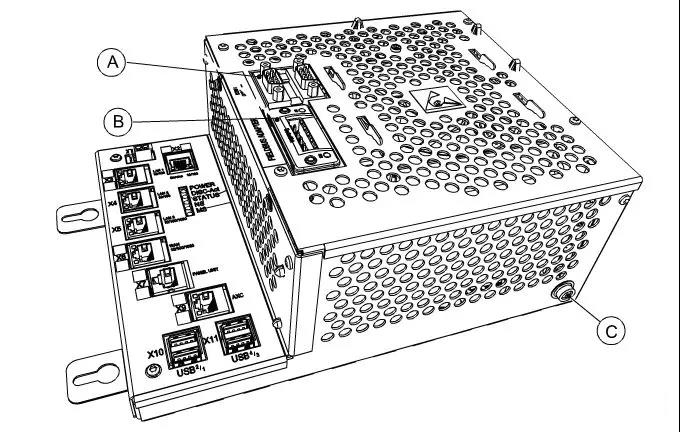


上面介绍了ABB机器人的DevikeNet选项, ABB工业机器人基于DevikeNet选项提供若干常见的IO(输入输出)板卡,方便用户直接配置和接线使用。 其中DSQC652为*常见板卡,如下图所示。

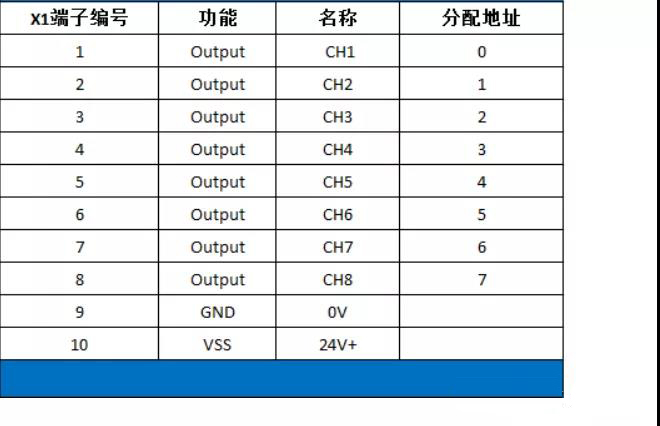
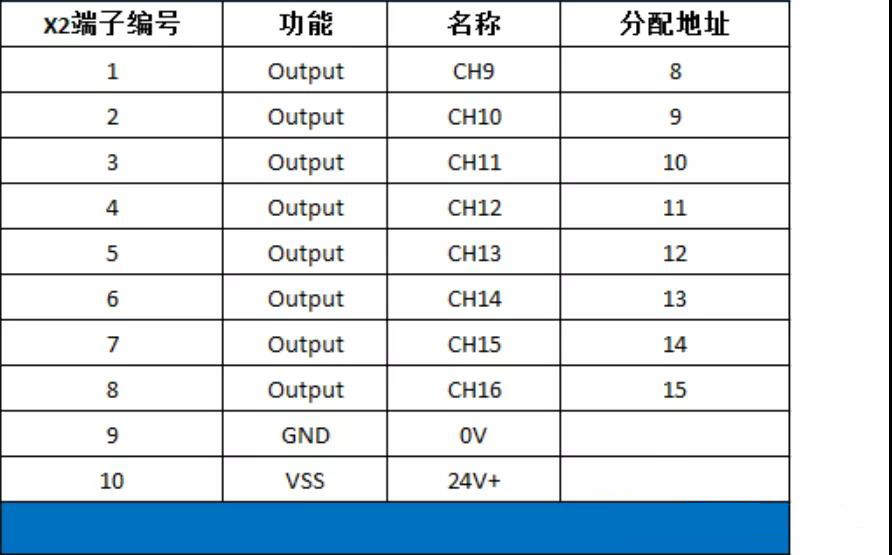
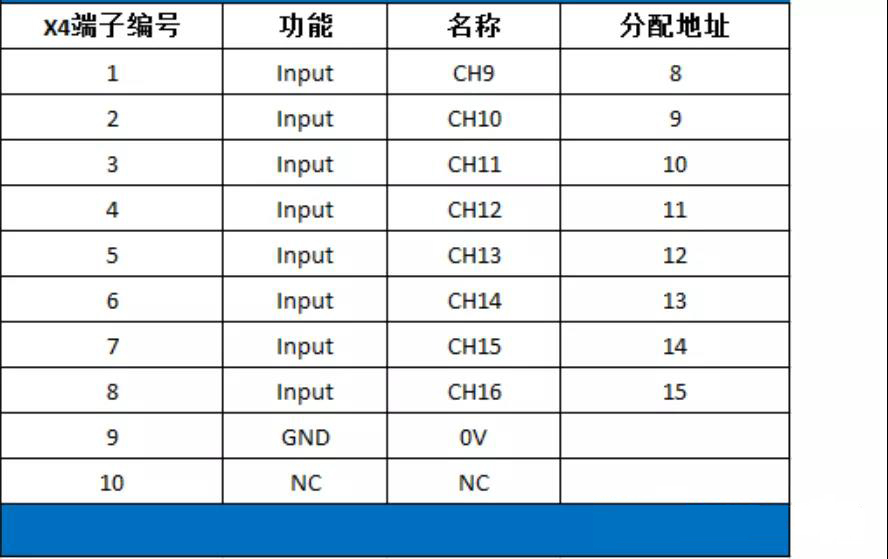
(2)在x1和x2的上方,有两排LED指示灯,每排八个,代表八个通道。当某一通道有信号输出时,该通道的LED灯点亮,如下图。

